|
DIA00215 ПИД-регулятор для поддержания темепературы Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. 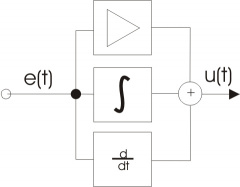 Для настройки коэффициентов ПИД-регулятора требуется сначала получить периодический отклик при воздействии на систему управляющим воздействием Далее Тут Однако, если процесс ассиметричный, к примеру, остывание системы быстрее чем нагрев, то необходимо учесть поправку к этой ошибке Для определения поправки, охладим систему на максимальной мощности, и потом дождёмся, когда она вновь нагреется. 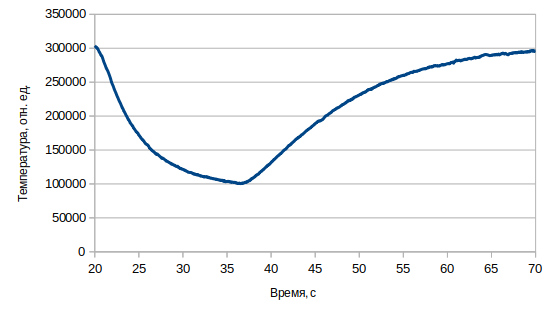 Так примерно мы сможем определить разницу в характерных временах для двух напревлений процесса и умножать либо делить разницу Теперь нам надо найти 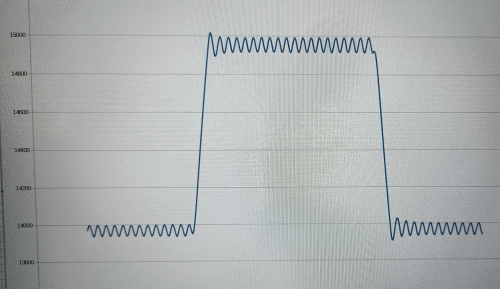 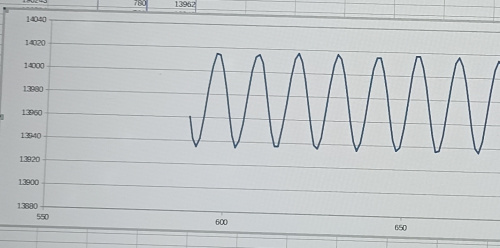 Для нашей системы Тогда согласно теории для управляющего воздействия на шаге
где Формула содержит как дифференциальную часть, где учитывается разница ошибки на текущем и предыдущем шаге, так и интегральная накопительная ошибка. В виде программного кода в прошивке прибора данный алгоритм реализован следующим образом: PROCEDURE SetPeltPWM (data: INTEGER); CONST dt = 0.1; delKp = 2.0; Ku = 105.0; Tu = 1.1; (* 1.1 c *) Kp = 63.0; (* Ku * 0.6 *) Td = 0.1375; (* Tu * 0.125 *) Kip = 1.818; (* 1 / (0.5 * Tu) *) VAR e, u: REAL; BEGIN currentTemp := data; e := FLT(data - temp); IF e > 0.0 THEN (* температура ниже заданной *) e := e * delKp ELSE e := e / delKp END; eInt := eInt + e; u := Kp * (e + Td * (e - ePr) / dt + Kip * eInt * dt); ePr := e; u := - u; coolPWM := FLOOR(u) + 4000; IF coolPWM < 0 THEN coolPWM := 0; eInt := eInt - e; ELSIF coolPWM > 7999 THEN coolPWM := 7999; eInt := eInt - e; END; PWM.SetTIM5(1, coolPWM); END SetPeltPWM;
 Ivan Denisov 01 Mar 2023 07:11
© International Open Laboratory for Advanced Science and Technology — MOLPIT, 2009–2026
|